Raspberry Pi Bare Metal: UART
(Post in Indonesian) Implementasi Serial UART dalam Raspberry Pi
Intro
Sebelumnya kita sudah membahas cara membuat program bare metal dalam Raspberry Pi 3 dan membuat pin GPIOnya bekerja. Sekarang, kita akan mempersiapkan program kita untuk bisa dikembangkan lagi dengan berbagai macam fitur. Salah satu persiapan tersebut adalah membuat tampilan output.
Tentu sudah jelas dengan memiliki tampilan output ini akan mempermudah kita dalam proses debugging. Namun, tidak semua fitur tampilan output mudah untuk diimplementasi. Kalau kita ingin membuat output melalui tampilan di monitor, maka kita harus implementasi driver GPU-nya, mengirim frame buffer, kemudian baru muncul tulisan di monitor kita. Lalu apa metode output yang bisa kita implementasi dengan mudah?
Penjelasan di bawah akan menggunakan Raspberry Pi 3 Model B. Datasheet BCM2837 bisa dicek disini.
UART
UART (Universal Asynchronous Receiver-Transmitter) merupakan peripheral device yang digunakan untuk komunikasi serial. Komunikasi “serial” disini maksudnya adalah kita mengirim data bit-per-bit.
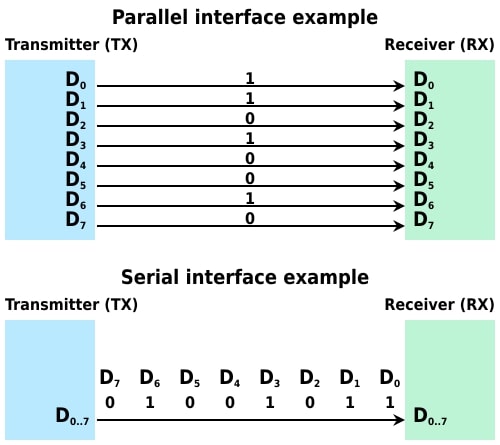 Contoh ilustrasi komunikasi serial. Diambil dari Wikipedia.
Contoh ilustrasi komunikasi serial. Diambil dari Wikipedia.
UART sendiri memiliki sequence khusus yang mana 1 bundel data (frame) mengandung beberapa komponen, seperti start bit, data, parity bit, dan stop bit. Komponen tersebut ada yang optional, dan ada yang harus dipakai. Untuk selengkapnya bisa dicek di Wikipedia.
 Contoh ilustrasi komunikasi serial. Diambil dari Wikipedia.
Contoh ilustrasi komunikasi serial. Diambil dari Wikipedia.
Komunikasi UART memiliki baud rate, bisa dibilang baud rate ini adalah kecepatan transmisinya. Dua subjek yang berkomunikasi melalui UART harus memiliki baud rate yang sama.
Kali ini, kita hanya akan mengoperasikan controllernya saja yang sudah embedded dalam SoC Raspberry Pi.
Verifikasi
Ada dua cara untuk memverifikasi cara kita mengoperasikan komponen UART: Melalui emulator (QEMU) atau menggunakan USB UART converter yang compatible dengan Raspberry Pi.
Menggunakan QEMU
QEMU merupakan salah satu tool emulator/virtualization open source yang bisa melakukan emulasi untuk berbagai macam sistem, termasuk Raspberry Pi 3. QEMU sendiri akan mempersiapkan emulasi dari berbagai macam peripheral termasuk UART yang akan kita gunakan.
Apabila sudah menginstall QEMU di Linux/MacOS, cukup jalankan QEMU dengan parameter -kernel mengarah ke binary ELF hasil compilenya.
1
2
3
4
qemu-system-aarch64 \
-nographic \
-M raspi3b \
-kernel target/aarch64-unknown-none/debug/osdev
Kelebihannya adalah kita tidak perlu bolak-balik memindahkan image untuk debugging. Kelemahannya (IMO) kita tidak bisa mereplikasi kondisi asli dari komunikasi serial, bisa saja berhasil di QEMU, namun gagal di koneksi fisik karena berbagai hal seperti clock yang tidak cocok.
Menggunakan USB UART converter
Kita membutuhkan alat khusus USB UART converter yang compatible dengan Raspberry Pi. Saya sendiri menggunakan Waveshare FT232 USB UART Board (bukan sponsor). Nantinya pin RXD (receiver) dari board ini akan dikoneksikan dengan pin TXD (transmitter) dari Raspberry Pi, dan sebaliknya.
Board lain bisa digunakan, asal memang compatible dengan Raspberry Pi.
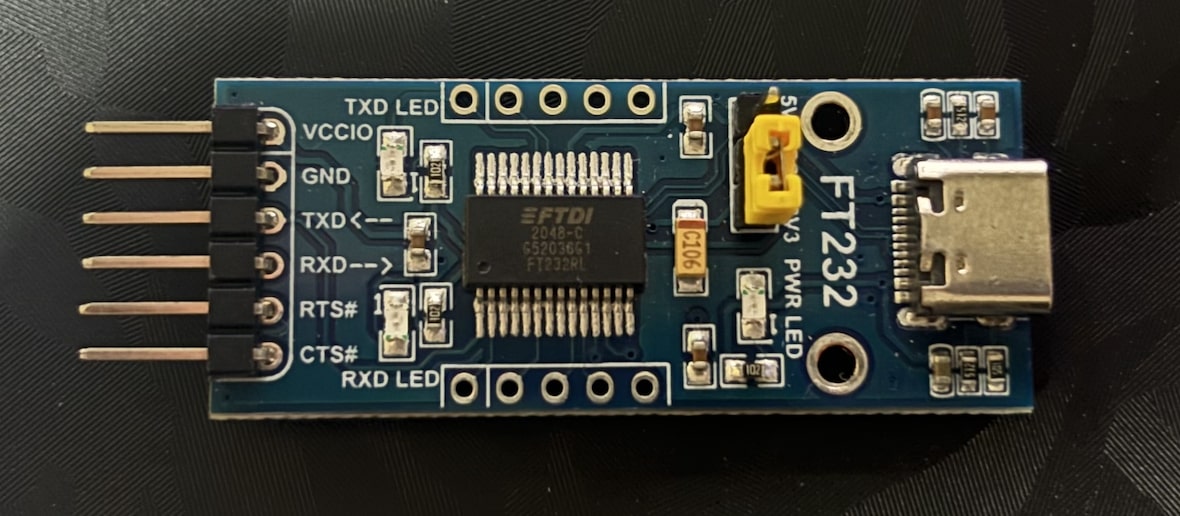 USB UART converter yang saya gunakan.
USB UART converter yang saya gunakan.
Untuk software, bisa menggunakan PuTTY (Windows), atau GNU screen, atau pyserial (module dari Python). Kita juga harus menentukan baud rate yang harus sama dengan baud rate yang digunakan oleh Raspberry Pi, biasanya kita menggunakan baud rate 115200bps.
Kelebihannya adalah kita bisa memastikan apakah komponen UART kita bekerja dengan baik, dan kekurangannya agak sulit untuk debugging apabila clock/baud ratenya salah.
Target
Dari datasheet, ada 2 komponen UART yang disediakan BCM2837:
- Mini UART
- PL011 UART
Apabila kita menggunakan Linux di Raspberry Pi, UART yang di-expose ke pin GPIO adalah MIni UART, sedangkan PL011 UART akan sepenuhnya diambil oleh bluetooth controller. Sayangnya, Mini UART memiliki clock yang terhubung ke core clock. Artinya, apabila core frequency kita berubah, maka baud ratenya berubah.
PL011 UART menggunakan clock yang terhubung ke clock khusus yang tidak berubah, karena kita belum menggunakan bluetooth, maka kita akan menggunakan UART ini.
Program kita akan mengoperasikan PL011 UART dan memiliki fungsi puts, putc, getc untuk meng-output karakter maupun string ke UART. Kita juga akan mengimplementasi Trait core::fmt::Write agar kita bisa menggunakan macro Rust write! dan writeln! yang memiliki fitur formatting.
Agar lebih simple, kita hanya akan membuat input output yang simple. Tidak ada parity bit check, dan tidak menggunakan interrupt (menggunakan polling saja).
Implementasi
Selain mengatur konfigurasi PL011 UART, kita juga harus mengatur konfigurasi GPIO yang akan digunakan sebagai transmitter/receiver.
Konfigurasi GPIO
Dari pinout.xyz, bisa dilihat Raspberry Pi menghubungkan GPIO 14 dan 15 ke UART TX/RX apabila GPIO tersebut dikonfigurasi ke FUNC0/ALT0 (bisa dicek disini). Dari tutorial sebelumnya kita sudah memiliki fungsi untuk mengatur function GPIO.
1
2
// Func0 is TXD0/RXD0
gpio::set_function((1 << 14) | (1 << 15), gpio::Function::Func0);
Kita juga harus mengatur pull up/down dari GPIO. Konfigurasi tersebut bisa diatur melalui dua buah register: GPPUD dan GPPUDCLKn. Dari datasheet juga dijelaskan bagaimana cara mengubah mode pull dari GPIO:
- Write ke GPPUD untuk mode yang diinginkan
- Sleep 150 cycle
- Nyalakan bit di GPPUDCLK0/1 sesuai untuk GPIO mana yang ingin diubah
- Sleep 150 cycle
- Hapus isi register GPPUD (set bit ke 0)
- Hapus isi GPPUDCLK0/1 (set bit ke 0)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
// Registers
struct Reg;
impl Reg {
const BASE: u64 = 0x0020_00_00;
const GPPUD: u64 = Reg::BASE + 0x94; // GPIO Pin Pull-up/down Enable
const GPPUDCLK0: u64 = Reg::BASE + 0x98; // GPIO Pin Pull-up/down Enable Clock 0
const GPPUDCLK1: u64 = Reg::BASE + 0x9C; // GPIO Pin Pull-up/down Enable Clock 1
}
// Pull up/down control mode.
pub enum PullMode {
// Off – disable pull-up/down
Disabled,
// Enable Pull Down control
PullDown,
// Enable Pull Up control
PullUp,
}
// Set pull mode for GPIOs 0..(MAX_GPIOs - 1) based on bit.
pub fn set_pull_mode(mut gpios: u64, mode: PullMode) {
// Make sure only 0..53 are set
gpios = gpios & ((1 << NUM_GPIOS) - 1);
let gpios_0: u32 = gpios as u32;
let gpios_1: u32 = (gpios >> 32) as u32;
// Write to GPPUD to set the required control signal
match mode {
PullMode::Disabled => mmio::write(Reg::GPPUD, 0x00),
PullMode::PullDown => mmio::write(Reg::GPPUD, 0x01),
PullMode::PullUp => mmio::write(Reg::GPPUD, 0x10),
}
// Wait 150 cycles – this provides the required set-up time for the control signal
synchronization::sleep(150);
// Write to GPPUDCLK0/1 to clock the control signal into the GPIO pads
// you wish to modify – NOTE only the pads which receive a clock will be
// modified, all others will retain their previous state
mmio::write(Reg::GPPUDCLK0, gpios_0);
mmio::write(Reg::GPPUDCLK1, gpios_1);
// Wait 150 cycles – this provides the required hold time for the control signal
synchronization::sleep(150);
// Write to GPPUD to remove the control signal
mmio::write(Reg::GPPUD, 0x00);
// Write to GPPUDCLK0/1 to remove the clock
mmio::write(Reg::GPPUDCLK0, 0x00);
mmio::write(Reg::GPPUDCLK1, 0x00);
}
Kita ingin mematikan mode pull up/down untuk pin GPIO14 dan 15.
1
2
// Disable pull up/down for GPIO pin 14, 15.
gpio::set_pull_mode((1 << 14) | (1 << 15), gpio::PullMode::Disabled);
Konfigurasi UART
Ada beberapa register yang akan kita operasikan untuk PL011 UART. Spesifikasi bisa dilihat dimulai dari halaman 175 dari datasheet. Register tersebut adalah:
CR(Control): Enable/disable UART termasuk beberapa sistem di dalamnya.ICR(Interrupt Clear): Menghapus interrupt dari UART.LCRH(Line control): Mengatur spesifikasi frame yang akan dikirim/diterima, seperti parity bit, berapa bit dalam datanya, dan lain-lain.IMSC(Interrupt mask control): Mengatur interrupt mana saja yang di-mask (agar CPU tidak meng-handle interrupt-nya)FR(Flag): Menunjukkan kondisi queue dari transmitter/receiver data, seperti queue full, queue empty.DR(Data): Tempat kita mengirim dan membaca data, ada beberapa bit yang menjadi informasi tentang data yang diterima.
Ada 2 lagi yang penting, yaitu
IBRD/FBRD(Integer/fractional baud rate divisor). 2 Register ini menentukan baud rate dari UART. Perhitungan baud rate sebenarnya menggunakan base clock yang mana untuk mencari frekuensinya harus menggunakan protokol mailbox (yang belum dibahas). Berdasarkan pengalaman pribadi, apabila 2 register ini tidak diatur, maka by default UART bisa bekerja menggunakan 115200bps. Kita tidak akan mengatur 2 register ini dulu.
Inisialisasi
Kita akan mengatur konfigurasi UART step-by-step:
- Matikan fungsi UART terlebih dahulu melalui
CR. - Hapus interrupt yang ada melalui
ICR. - Atur spesifikasi data melalui
LCRH- Aktifkan queue agar UART bisa menerima lebih dari 1 data
- Gunakan 1 stop bit
- Matikan parity bit
- Kita mengirim/menerima data sebesar 8 bit.
- Mask interrupt (Kita tidak punya interrupt handler) melalui
IMSC - Aktifkan UART, termasuk receiver dan transmitter.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
struct Reg;
impl Reg {
const PL011_BASE: u64 = 0x0020_10_00;
const PL011_DR: u64 = Reg::PL011_BASE + 0x00; // Data Register
const PL011_FR: u64 = Reg::PL011_BASE + 0x18; // Flag register
const PL011_IBRD: u64 = Reg::PL011_BASE + 0x24; // Integer Baud rate divisor
const PL011_FBRD: u64 = Reg::PL011_BASE + 0x28; // Fractional Baud rate divisor
const PL011_LCRH: u64 = Reg::PL011_BASE + 0x2C; // Line Control register
const PL011_CR: u64 = Reg::PL011_BASE + 0x30; // Control register
const PL011_IFLS: u64 = Reg::PL011_BASE + 0x34; // Interupt FIFO Level Select Register
const PL011_IMSC: u64 = Reg::PL011_BASE + 0x38; // Interupt Mask Set Clear Register
const PL011_RIS: u64 = Reg::PL011_BASE + 0x3C; // Raw Interupt Status Register
const PL011_MIS: u64 = Reg::PL011_BASE + 0x40; // Masked Interupt Status Register
const PL011_ICR: u64 = Reg::PL011_BASE + 0x44; // Interupt Clear Register
const PL011_DMACR: u64 = Reg::PL011_BASE + 0x48; // DMA Control Register
const PL011_ITCR: u64 = Reg::PL011_BASE + 0x80; // Test Control register
const PL011_ITIP: u64 = Reg::PL011_BASE + 0x84; // Integration test input reg
const PL011_ITOP: u64 = Reg::PL011_BASE + 0x88; // Integration test output reg
const PL011_TDR: u64 = Reg::PL011_BASE + 0x8C; // Test Data reg
}
struct Bit;
impl Bit {
// PL011_CR control
const PL011_CR_UARTEN: u32 = 1 << 0;
const PL011_CR_LBE: u32 = 1 << 7;
const PL011_CR_TXE: u32 = 1 << 8;
const PL011_CR_RXE: u32 = 1 << 9;
const PL011_CR_RTS: u32 = 1 << 11;
const PL011_CR_RTSEN: u32 = 1 << 14;
const PL011_CR_CTSEN: u32 = 1 << 15;
// PL011_LCRH control
const PL011_LCRH_BRK: u32 = 1 << 0;
const PL011_LCRH_PEN: u32 = 1 << 1;
const PL011_LCRH_EPS: u32 = 1 << 2;
const PL011_LCRH_STP2: u32 = 1 << 3;
const PL011_LCRH_FEN: u32 = 1 << 4;
const PL011_LCRH_WLEN_5: u32 = 0b00 << 5;
const PL011_LCRH_WLEN_6: u32 = 0b01 << 5;
const PL011_LCRH_WLEN_7: u32 = 0b10 << 5;
const PL011_LCRH_WLEN_8: u32 = 0b11 << 5;
const PL011_LCRH_WLEN_SPS: u32 = 1 << 7;
// PL011_ICR control
const PL011_ICR_CTSMIC: u32 = 1 << 1;
const PL011_ICR_RXIC: u32 = 1 << 4;
const PL011_ICR_TXIC: u32 = 1 << 5;
const PL011_ICR_RTIC: u32 = 1 << 6;
const PL011_ICR_FEIC: u32 = 1 << 7;
const PL011_ICR_PEIC: u32 = 1 << 8;
const PL011_ICR_BEIC: u32 = 1 << 9;
const PL011_ICR_OEIC: u32 = 1 << 10;
// Clear all
const PL011_ICR_ALL: u32 = Bit::PL011_ICR_CTSMIC
| Bit::PL011_ICR_RXIC
| Bit::PL011_ICR_TXIC
| Bit::PL011_ICR_RTIC
| Bit::PL011_ICR_FEIC
| Bit::PL011_ICR_PEIC
| Bit::PL011_ICR_BEIC
| Bit::PL011_ICR_OEIC;
// PL011_IMSC control
const PL011_IMSC_CTSMIM: u32 = 1 << 1;
const PL011_IMSC_RXIM: u32 = 1 << 4;
const PL011_IMSC_TXIM: u32 = 1 << 5;
const PL011_IMSC_RTIM: u32 = 1 << 6;
const PL011_IMSC_FEIM: u32 = 1 << 7;
const PL011_IMSC_PEIM: u32 = 1 << 8;
const PL011_IMSC_BEIM: u32 = 1 << 9;
const PL011_IMSC_OEIM: u32 = 1 << 10;
// Mask all
const PL011_IMSC_ALL: u32 = Bit::PL011_IMSC_CTSMIM
| Bit::PL011_IMSC_RXIM
| Bit::PL011_IMSC_TXIM
| Bit::PL011_IMSC_RTIM
| Bit::PL011_IMSC_FEIM
| Bit::PL011_IMSC_PEIM
| Bit::PL011_IMSC_BEIM
| Bit::PL011_IMSC_OEIM;
// PL011_FR control
const PL011_FR_CTS: u32 = 1 << 0;
const PL011_FR_BUSY: u32 = 1 << 3;
const PL011_FR_RXFE: u32 = 1 << 4;
const PL011_FR_TXFF: u32 = 1 << 5;
const PL011_FR_RXFF: u32 = 1 << 6;
const PL011_FR_TXFE: u32 = 1 << 7;
}
pub fn pl011_init() {
// Func0 is TXD0/RXD0
gpio::set_function((1 << 14) | (1 << 15), gpio::Function::Func0);
// Disable pull up/down for GPIO pin 14, 15.
gpio::set_pull_mode((1 << 14) | (1 << 15), gpio::PullMode::Disabled);
// Disable everything first
mmio::write(Reg::PL011_CR, 0x00);
// Clear pending interrupts
mmio::write(Reg::PL011_ICR, Bit::PL011_ICR_ALL);
// Enable FIFO
// 8 bit data transmission (1 stop bit, no parity).
mmio::write(
Reg::PL011_LCRH,
Bit::PL011_LCRH_FEN | Bit::PL011_LCRH_WLEN_8,
);
// Mask all interrupts.
mmio::write(Reg::PL011_IMSC, Bit::PL011_IMSC_ALL);
// Enable UART, receive and transfer.
mmio::write(
Reg::PL011_CR,
Bit::PL011_CR_UARTEN | Bit::PL011_CR_RXE | Bit::PL011_CR_TXE,
);
}
Operasi input/output
Kita akan implementasi fungsi berikut menggunakan UART:
putc(Put character)puts(Put string)getc(Get character)
putc (Put character)
Untuk putc, langkah yang harus kita lakukan adalah
- Tunggu sampai queue transmisi sudah tidak penuh melalui register
FR(Hal ini dinamakan polling). - Tulis karakter ke dalam register
DR
1
2
3
4
5
pub fn pl011_putc(c: u8) {
// Wait for TX FIFO not empty
while mmio::read(Reg::PL011_FR) & Bit::PL011_FR_TXFF != 0 {}
mmio::write(Reg::PL011_DR, c as u32);
}
puts (Put string)
puts sama saja seperti melakukan putc untuk setiap karakternya.
1
2
3
4
5
pub fn pl011_puts(s: &str) {
for c in s.as_bytes() {
pl011_putc(*c);
}
}
getc (Get character)
Untuk getc, kita harus:
- Menunggu sampai queue transmisi sudah tidak kosong melalui register
FR - Baca karakter dari register
DR.
1
2
3
4
5
pub fn pl011_getc() -> u8 {
// Wait for any inputs
while mmio::read(Reg::PL011_FR) & Bit::PL011_FR_RXFE != 0 {}
return (mmio::read(Reg::PL011_DR) & 0xFF) as u8;
}
Testing
Kita akan mencoba membuat program “Hello world” menggunakan UART yang baru kita buat. Selain itu, kita juga akan test fungsi getc kita dengan membuat program echo.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
fn test_uart() {
uart::pl011_init();
uart::pl011_puts("UART TEST\r\n");
uart::pl011_puts("Hello, kernel World from Rust!\r\n");
loop {
uart::pl011_putc(uart::pl011_getc());
}
}
#[no_mangle]
extern "C" fn kernel_main() {
test_uart();
}
Compile programnya, dan jalankan.
Jalankan melalui QEMU
Test melalui QEMU bisa dilakukan dengan binary ELF hasil kompilasi:
1
2
3
4
5
6
7
qemu-system-aarch64 \
-nographic \
-M raspi3b \
-kernel target/aarch64-unknown-none/debug/osdev
UART TEST
Hello, kernel World from Rust!
Untuk keluar dari QEMU, tekan CTRL+A kemudian tekan X.
Jalankan menggunakan USB UART
Untuk USB UART, saya menggunakan module Python 3 pyserial. Bisa juga menggunakan PuTTY atau GNU Screen. Silakan menyesuaikan asal yang penting baud ratenya 115200bps.
Pastikan pin TXD dari USB UART terkoneksi ke pin RXD dari Raspberry Pi, dan sebaliknya. Jangan lupa juga hubungkan pin GND (ground).
1
2
3
4
5
6
7
8
9
10
11
12
python3 -m serial --eol LF - 115200
--- Available ports:
--- 1: /dev/cu.Bluetooth-Incoming-Port 'n/a'
--- 2: /dev/cu.usbserial-AB0MN1QF 'FT232R USB UART'
--- 3: /dev/cu.wlan-debug 'n/a'
--- Enter port index or full name: 2
--- Miniterm on /dev/cu.usbserial-AB0MN1QF 115200,8,N,1 ---
--- Quit: Ctrl+] | Menu: Ctrl+T | Help: Ctrl+T followed by Ctrl+H ---
UART TEST
Hello, kernel World from Rust!
Apabila yang muncul adalah karakter tidak jelas (selamat debugging!), mungkin cek kabelnya, atau coba baud rate yang lain yang umum: 9600, 19200, 38400, 57600, …
Formatted output
Kita kadang perlu membuat output yang support formatting, seperti print angka dari integer, atau hex. Rust memiliki support ini melalui macro core::write! dan core::writeln!. Untuk menambahkan support ini ke UART kita, kita cukup membuat implementasi dari Trait core::fmt::Write.
1
2
3
4
5
6
7
pub struct UartPl011;
impl core::fmt::Write for UartPl011 {
fn write_str(&mut self, s: &str) -> core::fmt::Result {
pl011_puts(s);
Ok(())
}
}
Dan macro sudah langsung bisa digunakan. Namun, macro di atas akan memberikan return Result, yang mana terkadang Rust terlalu strict dan menyuruh kita menggunakan Result-nya. Hal ini bisa diatasi dengan membuat macro tambahan.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
#[macro_export]
macro_rules! print {
( $( $arg:expr ),* ) => {
{
use crate::io::uart::UartPl011;
use core::fmt::Write;
core::write!(UartPl011{}, $($arg),*).expect("Print failed");
}
}
}
#[macro_export]
macro_rules! println {
( $( $arg:expr ),* ) => {
{
use crate::io::uart::UartPl011;
use core::fmt::Write;
core::writeln!(UartPl011{}, $($arg),*).expect("Print failed");
}
}
}
pub use print;
pub use println;
Sekarang, kita bisa melakukan print seperti berikut:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
fn test_uart() {
uart::pl011_init();
uart::pl011_puts("UART TEST\r\n");
uart::pl011_puts("Hello, kernel World from Rust!\r\n");
uart::println!(
"Decimal number print test (expected: 1234567890): {}",
1234567890
);
uart::println!(
"Hexadecimal number print test (expected: 0xCAFECAFE): 0x{:X}",
0xCAFECAFE as i64
);
loop {
uart::pl011_putc(uart::pl011_getc());
}
}
1
2
3
4
5
6
7
8
9
qemu-system-aarch64 \
-nographic \
-M raspi3b \
-kernel target/aarch64-unknown-none/debug/osdev
UART TEST
Hello, kernel World from Rust!
Decimal number print test (expected: 1234567890): 1234567890
Hexadecimal number print test (expected: 0xCAFECAFE): 0xCAFECAFE
Informasi yang terlewatkan
Sebelumnya sudah disinggung sebelumnya bahwa baud rate dari PL011 UART berasal dari base clock khusus, yang mana untuk membaca frekuensi clock tersebut harus melalui protokol Mailbox yang belum diimplementasikan. Untuk Raspberry Pi 3, frekuensi dari clock tersebut biasanya di-set ke 3MHz, atau untuk versi bootloader yang terbaru, di-set ke 48MHz. Apabila ada masalah dalam output, mungkin bisa disesuaikan register IBRD dan FBRD nya dengan clock rate tersebut.
Kesimpulan
UART adalah salah satu peripheral device yang digunakan untuk melakukan komunikasi serial. Komunikasi menggunakan UART lebih simpel daripada melakukan input-output lain untuk membantu kita debugging. Raspberry Pi memiliki dua buah UART device dan kita berhasil mengoperasikan salah satunya.
Referensi kode bisa juga dilihat di commit ini.
Untuk selanjutnya, mungkin bisa dikembangkan lebih lanjut untuk mengembangkan peripheral yang lain, seperti Mailbox, ataupun Display. Kita bisa juga untuk mulai mengimplmenetasikan memory management.